Очувствленная трехпальцевая кисть Schunk SDH2 предназначена для деликатного захвата объектов, захвата объектов сложной формы, проведения операции распознавания формы объекта – «ощупывания».
Внешний вид SDH2 представлен на рисунке.
Кинематическая схема захвата приведена на рисунке.
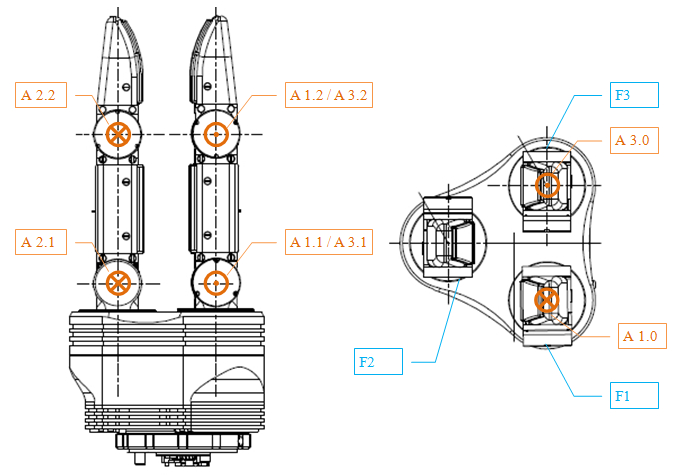
SDH2 оснащен тремя пальцами: F1, F2, F3. Каждый палец FN имеет две степени свободы - в дистальном шарнире c осью «A N.1» и проксимальном шарнире c осью «A N.2». Пальцы F1 и F3 также могут вращаться вокруг осей «A N.0». Вращение пальцев F1 и F3 вокруг осей «A N.0» механически спарено, движением пальцев управляет один привод.
Обе фаланги каждого пальца снабжены тактильными сенсорами – «искусственной кожей». Каждый сенсор оснащен встроенным контроллером. Подробнее тактильные сенсоры описаны в подразделе
Тактильные сенсоры кисти.
В основание SDH2 встроен контроллер управления кистью. Контроллер оснащен коммуникационными интерфейсами RS-232 и CAN, позволяющими управлять кистью от внешних вычислительных устройств – персонального компьютера, стойки управления ПР и других. Контроллер управляет приводами кисти с заданными параметрами движения, получает и обрабатывает информацию от датчиков положения шарниров и тактильных сенсоров, обеспечивает работу коммуникационного протокола связи с внешними вычислительными устройствами.
Технические характеристики SDH2 приведены в таблице.
Технические характеристики SDH2
| Количество пальцев |
6 |
|---|
| Количество степеней свободы |
7 |
|---|
| Количество степеней свободы пальца |
2 |
|---|
| Количество тактильных сенсоров |
6 |
|---|
| Количество датчиков положения шарниров |
7 |
|---|
| Повторяемость |
0,011° |
|---|
| Максимальная скорость в шарнирах, °/с |
210 |
|---|
| Момент проксимальных шарниров, Н•м |
2,1 |
|---|
| Момент дистальных шарниров, Н•м |
1,4 |
|---|
| Длина пальца, м |
0,155 |
|---|
| Масса захвата, кг |
1,95 |
|---|


