Система безопасности (СБ) или система избегания столкновений является средством предотвращения столкновений МР с окружающими предметами и пересечения звеньев друг с другом. Необходимость такой системы для ручных режимов управления движением в декартовом пространстве очевидна. Необходимость СБ для спланированных заранее траекторий (безопасность которых обеспечивается при планировании) обусловлена тем, что реальное движение МР может значительно отличаться от планового. Это связано с неучтенными при планировании особенностями реальной динамики МР, ошибками слежения приводов шарниров, а также появлением так называемых нештатных ситуаций.
Программа СБ постоянно проверяет текущее положение МР с целью выявления возможного столкновений МР и объектов внешней среды с окружающими предметами. Для этого используются геометрические модели МР, груза и окружающей среды.
СБ использует следующее правило проверки наличия столкновений: «Столкновение между объектами наличествует тогда и только тогда, когда относительное расстояние между ними меньше некоторого заданного предельного значения». В зависимости от вида объектов, участвующих в столкновении, определены несколько классов столкновений:
• между элементами МР;
• между элементами МР и внешними препятствиями;
• между элементами МР и полезным грузом;
• между ПГ и внешними препятствиями.
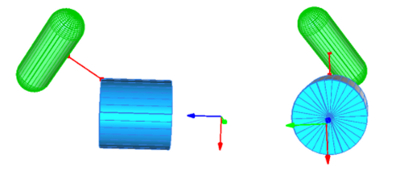
В СБ модели МР целесообразно представить из трехмерных аппроксимаций действительных объектов. Так, например, модель 7-звенного КМР ERA представляется состоящей из 4-х соединенных звеньев. Геометрическая модель звена определяется как сферическое удлинение цилиндра, то есть, как объем, содержащий все точки, отстоящие от сегмента на расстояние, меньшее или равное радиусу R.
Модель среды должна представляет сложные контуры компонентов рабочей зоны, которые не могут быть подвергнуты некоторому обобщенному упрощению. В программном обеспечении СБ применяется индивидуальный и иерархический подход к каждому модулю.
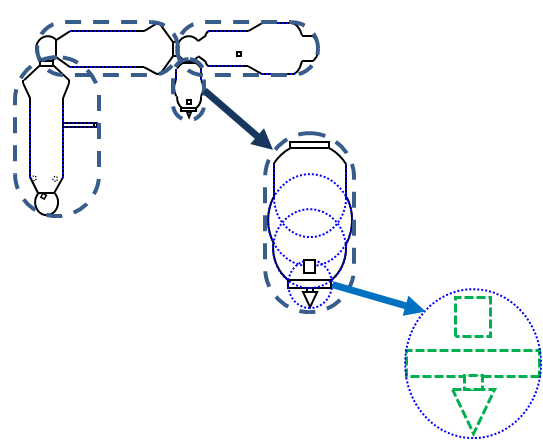
Самые большие распознаваемые компоненты рабочей зоны - препятствия. Для каждого препятствия определена иерархия вложенных субкомпонентов таким образом, чтобы обеспечить иерархическую организацию алгоритмов проверки безопасности движения. Когда МР подходит все ближе и ближе к препятствию, препятствие представляется все большим количеством более детализированных моделей меньшего размера, которые на самом нижнем уровне совпадают с его реальным обликом. Только когда МР находится очень близко от объекта окружения, алгоритм проходит по всем иерархическим уровням, опускаясь в конце практически до реального облика; во всех других случаях достаточно выполнить проверку на нескольких верхних уровнях детализации, чтобы гарантировать безопасность операции.
Элементы препятствия - многогранники - моделируются в виде их сферических расширений, определяемого как объем, содержащий все точки, находящиеся на расстоянии от многогранника, меньшем, или равном предельному.
Проверка возможности столкновения в СБ ведется циклической с частотой не ниже 1Гц. СБ активна, только если МР находится в движении, и может быть деактивирована пользователем. При функционировании этой проверки на каждом цикле СБ возвращает статус контроля:
нормально,
предупреждение или
опасность.
Нормально означает отсутствие возможности столкновения.
Предупреждение – на экране пользователя появляется требование остановить МР вручную.
Опасность означает, что компьютер должен перехватить управление и немедленно остановить МР, независимо от того, что МР делает.