Динамика, алгоритмы и программы движения КМР моделируются в ФМС методом компьютерного моделирования в реальном масштабе времени (с использованием системы моделирования КМР в реальном масштабе времени МСРВ).
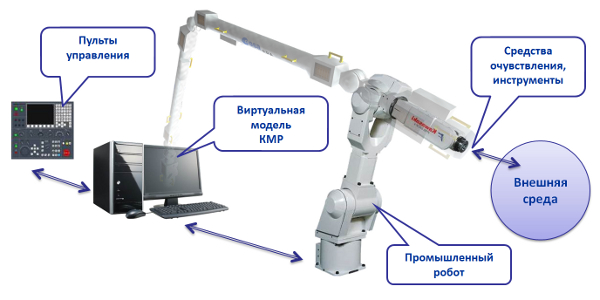
Сигналы же управления КМР и координаты КМР формируются и отображаются с помощью реальных средств человеко-машинного интерфейса (пульт IMMI), которые по отношению к модели КМР выступают как внешние устройства. Помимо IMMI, координаты из модели передаются физический макет КМР (промышленный робот), который также по отношению к модели является внешним устройством.
МСРВ воспроизводит динамические реакции КМР, в том числе – реакции на контактные усилия и на команды с пульта оператора IMMI. В течение процесса моделирования модель передает с заданным интервалом вычисленные координаты схвата КМР в управляющий компьютер ПР, и его ЕЕ (End Effector) в точности копирует движение схвата моделируемого КМР. Для имитации контакта во время выполнения операции используются макеты внешнего оборудования (мишень, ПГ, такелажный элемент и т.д.). Измеренные с помощью СМД силы контакта передаются обратно в модель, которая, в свою очередь, моделирует реакцию КМР на измеренные силы.